
田间的杂草与病虫害,从来不是″看见就行″的问题。它们是一组被生长速度、作物行距、叶片遮挡、土壤湿度与风场共同塑形的动态对象。也正因如此,植保机器人的路线分化并不是″谁更先进″的键盘之战,而是两种完全不同的工程答案:一条路是用激光把″清除″做成非接触的点杀;另一条路是把″施用″做成识别后的定点、变量与可追踪。
在公开资料与行业实践里,这两条路线各自形成了相对稳定的技术栈与产品形态。它们争的也不是某个单一指标,而是″植保动作如何落到作物上″的底层逻辑:到底是把问题变成能量的精准投送,还是把问题变成药液的精准投送。
01
争论的起点:同一个田间目标,两种″物理实现″
如果把植保任务拆到最底层,会发现激光除草与精准喷药的共同前提都是″识别″。机器人必须先在作物与杂草、健康与病斑之间做出区分,然后把控制指令转译为一次可复现的动作。差异发生在最后一步:激光系统把″动作″固化为对目标组织的能量照射;喷药系统把″动作″固化为一次微剂量、可调流量的液滴沉积。
这意味着两条路线在工程实现上,会自然走向不同的整机形态。激光方案更像一台″带着大量光学与照明系统的移动点杀平台″,喷药方案则更像″把喷头做成可控阵列的识别施用平台″。路线不同,整机的传感配置、作业窗口、维护方式与数据闭环方式都会随之改变。
简单来说,它们的竞争维度可以归结为下表:
02
激光除草:把″除草″改写成可编程的能量点杀
激光除草能在行业里快速形成辨识度,一个关键原因是它把″除草″从机械接触与化学施用中抽离出来:不依赖刀具入土,也不依赖药液覆盖,而是把能量精准落到杂草生长点或关键组织上。只要识别可靠、对准稳定,理论上就能在作物旁近距离作业,且不会引入药剂漂移、残留或配比误差这类变量。
以 Carbon Robotics 的 LaserWeeder G2 600 为例,其公开规格中给出了非常典型的″产品化叙事″:多模块结构下配置24 个 240W 二极管激光器与36 个高分辨率相机,配合高强度床面照明与多作物模型,宣称最高每分钟可点杀 10,000 株杂草,作业覆盖能力为 1.50–3.00 英亩/小时,并以″亚毫米精度″描述其对准控制能力。这些指标背后反映的并不是单点硬件堆叠,而是一套为田间连续作业设计的系统:识别—对准—发射—记录—再识别的循环,需要在行进过程中稳定闭环。
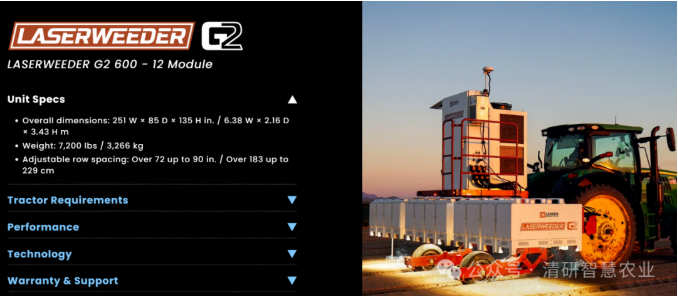
图片来自 Carbon Robotics
但激光除草的″硬边界″也同样来自物理层。激光对杂草的抑制效果与能量密度、照射时间、波段吸收特性、杂草生育期强相关。2024 年一篇关于机械-激光协同除草原型的研究给出了更细的实验视角:不同波段与功率下,为实现稳定控制需要的能量密度存在明显差异,并指出效率与植物对特定波长的吸收能力相关。2025 年的综述也在讨论中强调:随着杂草生长阶段变化,达到同等控制效果所需能量密度会上升,若在系统层面缺少对″生育期—能量策略″的自适应,很容易出现能量浪费与效率波动。
换句话说,激光除草的难点并不止于″能不能打中″,还在于″能不能在不同生长阶段与作物条件下,把能量策略做成可持续的工程参数″。
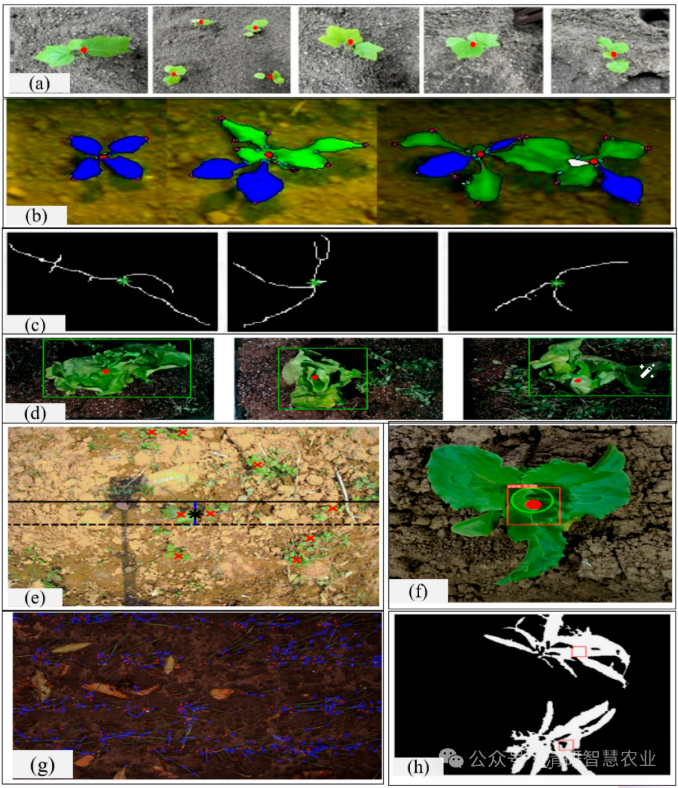
识别杂草顶端生长区的潜在算法示例
图片来自MDPI《Progress and Challenges in Research on Key Technologies for Laser Weed Control Robot-to-Target System》
03
精准喷药:把″喷洒″改写成可控阵列的定点沉积
精准喷药路线的产业化更早,也更贴近农业机械的传统形态:喷杆、喷头、泵阀、流量计与行进速度的协同,本来就是现代植保机械的基本功。不同之处在于,机器视觉与实时控制把″整幅覆盖″改造成″看见才喷、看清再喷、按目标喷″。
约翰迪尔在 2023–2024 年围绕 See & Spray 产品线的公开信息,给出了一个″规模化落地″的样本:公司新闻稿提到 See & Spray 已应用于超过 100 万英亩田块,并引用田间结果称平均可节省 59% 的除草剂;同时还提到一项来自爱荷华州立大学的研究,在特定条件下″产品用量节省可达 76%″。这类数据的意义不在于″省了多少″,而在于它证明了视觉识别、喷头控制、速度协同与田间适配可以被做成可重复的产品能力,并且能在大面积应用中保持可解释的效果区间。

图片来自John Deere《See & Spray™ Customers See 59% Average Herbicide Savings in 2024》
欧洲路线里,ecoRobotix 这类田间小型平台则把″精准″做得更细:通过识别后微剂量点喷,把喷头控制进一步下沉到单株或小斑块级别。其公开资料与关联研究常用″用量大幅减少″来描述价值,并与学术论文形成互证。 这类系统的工程关注点,往往落在喷雾沉积一致性、风场扰动、喷头动态响应与识别误差的耦合上,喷得少并不自动等于喷得准,真正的难点是让″识别置信度″与″喷头动作″在运动中紧密绑定。

图片来自研究中心自主研发飞播无人机的比例模型
04
同一个瓶颈:遮挡、光照与″看不清″如何传导到动作失败
无论激光还是喷药,一旦进入真实田间,遮挡与光照都会成为第一批″把算法拖下水″的变量。枝叶遮挡会导致目标轮廓破碎,反光与阴影会改变纹理与颜色分布,尘土与水雾会降低成像对比度。最终,识别误差会传导为动作误差:激光打偏,或者喷头对着非目标区域开合。
这也是为什么近年的研究与工程实践越来越强调多源传感与主动照明:深度信息能补足二维纹理在阴影下的失真,近距离补光能把夜间或逆光条件″拉回可控范围″。有研究专门指出,在农业场景中照明变化会显著影响基于视觉的识别与分割表现,并将其作为系统设计必须正视的因素之一。
从量产角度看,″看不清″从来不是单一模型的问题,而是成像、照明、安装角度、清洁维护与标定策略共同决定的系统属性。它决定了植保机器人能否跨季节、跨地块复用,而不是只在理想条件下展示能力。
05
工程分水岭:激光与喷药背后的整机组织方式
把视角从算法拉回整机,会看到两条路线的组织方式差异更明显。
激光除草为了实现″点杀″,往往把大量资源投入到对准精度、照明一致性与轨迹稳定性上。它的产品化表达通常是″更高的点杀密度、更稳定的对准、更宽的作业速度区间″,并把作业数据记录成可追踪指标。
精准喷药则更强调″控制阵列″:喷头数量、阀响应时间、流量闭环与行进速度同步,构成了喷药的核心能力。它的产品化表达更像″把喷洒做成一套可控的实时系统″,并以田间作业规模与一致性证明其工程稳定性。
附件中对两条路线的对比,也把重点落在″目标对象、执行方式、系统复杂度与数据闭环″这些工程维度上,这一框架非常适合公众号读者理解″争什么″。
06
真正决定路线走多远的,是″闭环被做成了什么″
讨论植保机器人时,人们很容易被″激光更硬核″或″喷药更现实″带偏。但把研发到量产的路径拉长,会发现决定性因素更朴素:系统能不能把闭环做扎实,并在田间把误差消化掉。
激光方案要在行进中稳定完成″识别—对准—发射″,任何一环波动都会让点杀密度下降;喷药方案要在运动中把″识别—阀控—沉积″绑定在同一时间尺度上,任何延迟都会把喷洒落到错误位置。两条路线都在追求一种相同的成熟信号:不是演示一次成功,而是在田块里持续稳定运行,把作业过程变成可复用的数据与参数体系。
这也是为什么行业里越来越多产品开始强调作业记录、任务回放、指标面板与远程运维:它们不是″锦上添花″,而是把田间不确定性纳入工程闭环的必要组件。
这场″武器之争″,本质上是植保动作的两种工业化。激光除草与精准喷药看似在争″谁更强″,实际争的是植保动作的工业化路径:一个把能量投送做成可编程点杀,一个把药液投送做成识别后定点沉积。它们在不同作物结构、不同田间窗口与不同监管环境下,都可能形成各自稳定的产品形态;而真正推动行业前进的,不是站队,而是把识别、对准/阀控、行进稳定与数据记录这些″慢功夫″持续打磨成工程能力。